















Кинематика гидравлических горных экскаваторов
Уникальная кинематика привода рабочего оборудования TriPower
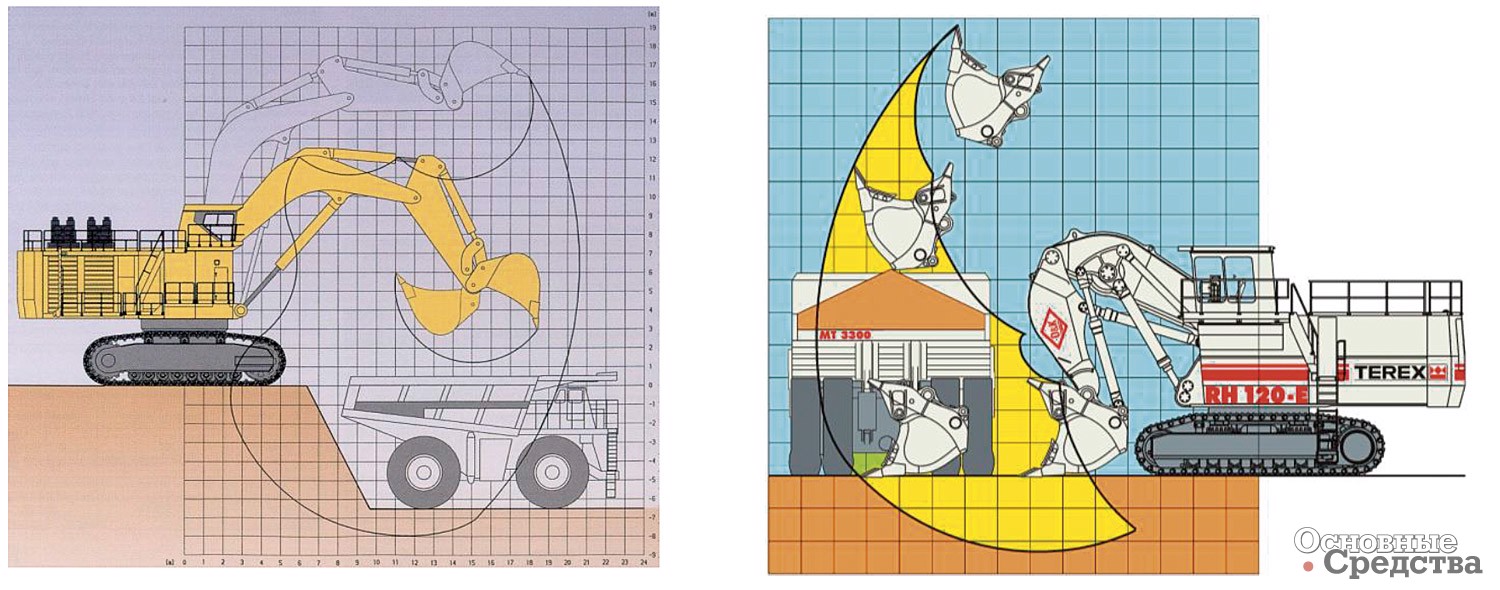
Гидравлические экскаваторы состоят из следующих основных узлов: ходовая часть, поворотная платформа и рабочее оборудование. Рабочее оборудование служит для копания, рыхления и погрузки самосвалов. Основные части рабочего оборудования – основная стрела, рукоять и ковш. Усилия для движения рабочего оборудования создаются гидравлическими цилиндрами. Функциями гидроцилиндров управляет оператор экскаватора.

Гидравлические экскаваторы разделяют на два типа по принципиальному устройству рабочего оборудования. Первоначалъное рабочее оборудование у гидравлических экскаваторов – прямая лопата. Этот вид рабочего оборудования был заимствован у канатных экскаваторов. Канатные горные экскаваторы вследствие своей принципиальной конструкции и технологии работы могут иметь только прямую лопату. Существуют канатные экскаваторы с рабочим оборудованием обратная лопата, но такая конструкция реализуется с повышенными техническими сложностями. В горном деле канатные экскаваторы традиционно работают с прямой лопатой и со створчатым ковшом.
Со временем в различных регионах мира сложились определенные традиции использования разных типов экскаваторов. Еще недавно можно было наблюдать рост применения экскаваторов с обратной лопатой на открытых разработках. Причиной подобной популярности явилась возможность улучшения технологии погрузки самосвалов и уменьшения угла поворота платформы экскаватора при погрузке.
Такую аргументацию нельзя считать абсолютной нормой. В конечном итоге эффективность эксплуатации погрузочно-транспортных машин всегда зависит от технологии, реализованной в конкретном карьере.
В журнале «Основные средства» № 3, 2022 г. более детально рассматривается потенциал производительности карьерных экскаваторов и раскрываются факторы, на практике определяющие уровень производительности. Помимо схемы кинематики рабочего оборудования устройство гидросистемы имеет большое значение для потенциала производительности.
Кинематика TriPower
В данной статье описывается конструкция, которая, по мнению изобретателя и изготовителя, существенно улучшает производительность экскаваторов с прямой лопатой. Эта уникальная и до сих пор никаким другим изготовителем не освоенная кинематика называется TriPower. Кинематика TriPower в 1989 г. была изобретена и запатентована конструктором компании О&К (Orenstein & Koppel; сегодня Caterpillar) и с тех пор применяется на всех экскаваторах массой свыше 100 т.
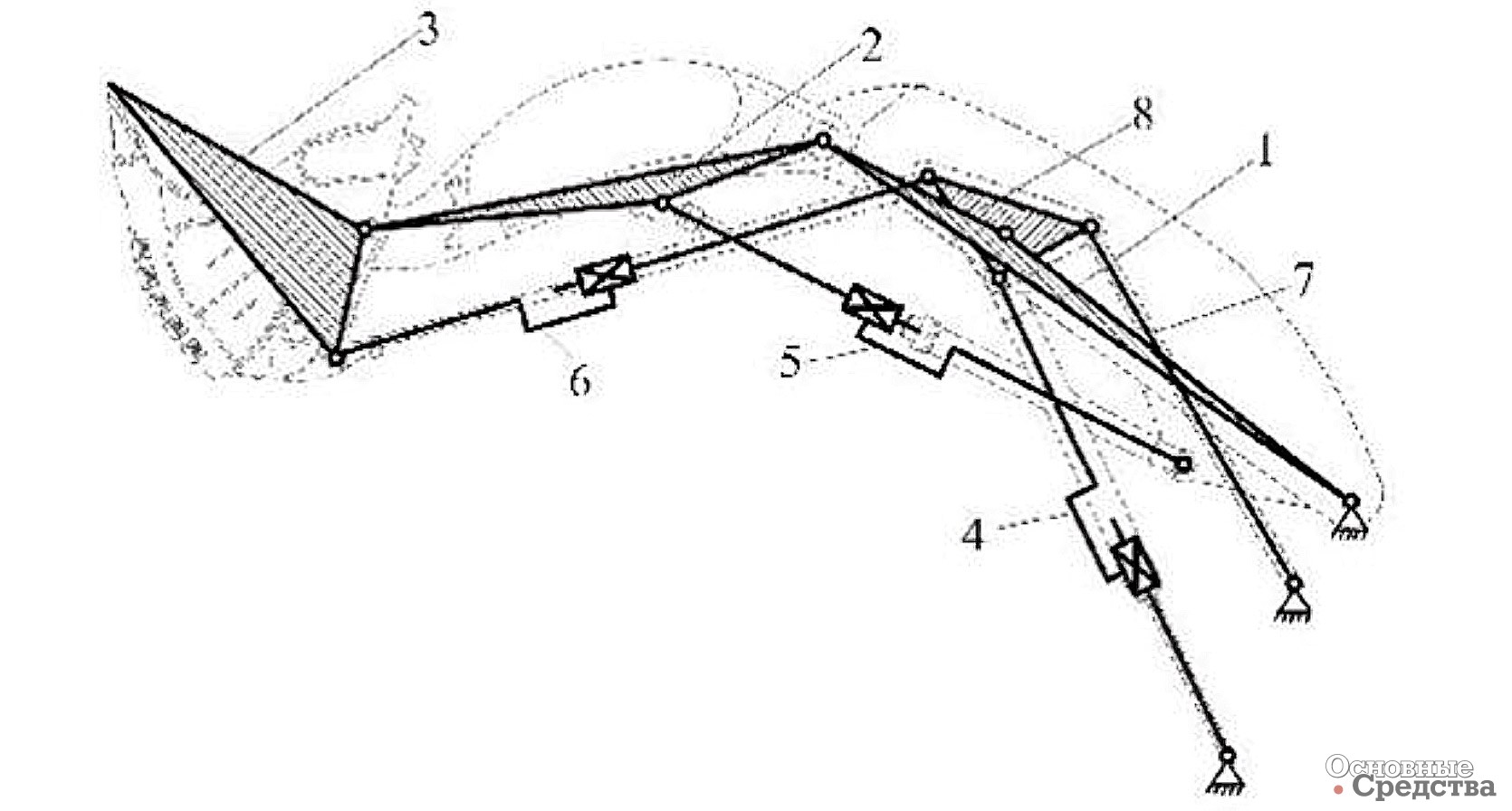
Кинематическая схема оборудования TriPower изображена на рис. 4. Кинематика состоит из 8 звеньев. Основная стрела (1), рукоять (2) и ковш (3) приводятся в действие гидроцилиндрами (4, 5, 6). Цилиндры (4, 5) не связаны напрямую с основной стрелой, а действуют на треугольное звено (8). Это звено связано с основной стрелой с помощью тяги неизменной длины (7). Когда цилиндр (4) выдвигается, поднимается основная стрела (1) и трехопорное звено (8) поворачивается по часовой стрелке. Когда цилиндр (6) заблокирован, он действует как тяга неизменной длины. Треугольное звено (8) тянет ковш (3) и поворачивает его против часовой стрелки (см. рис. 4, 5).
Эффект кинематики TriPower следующий.
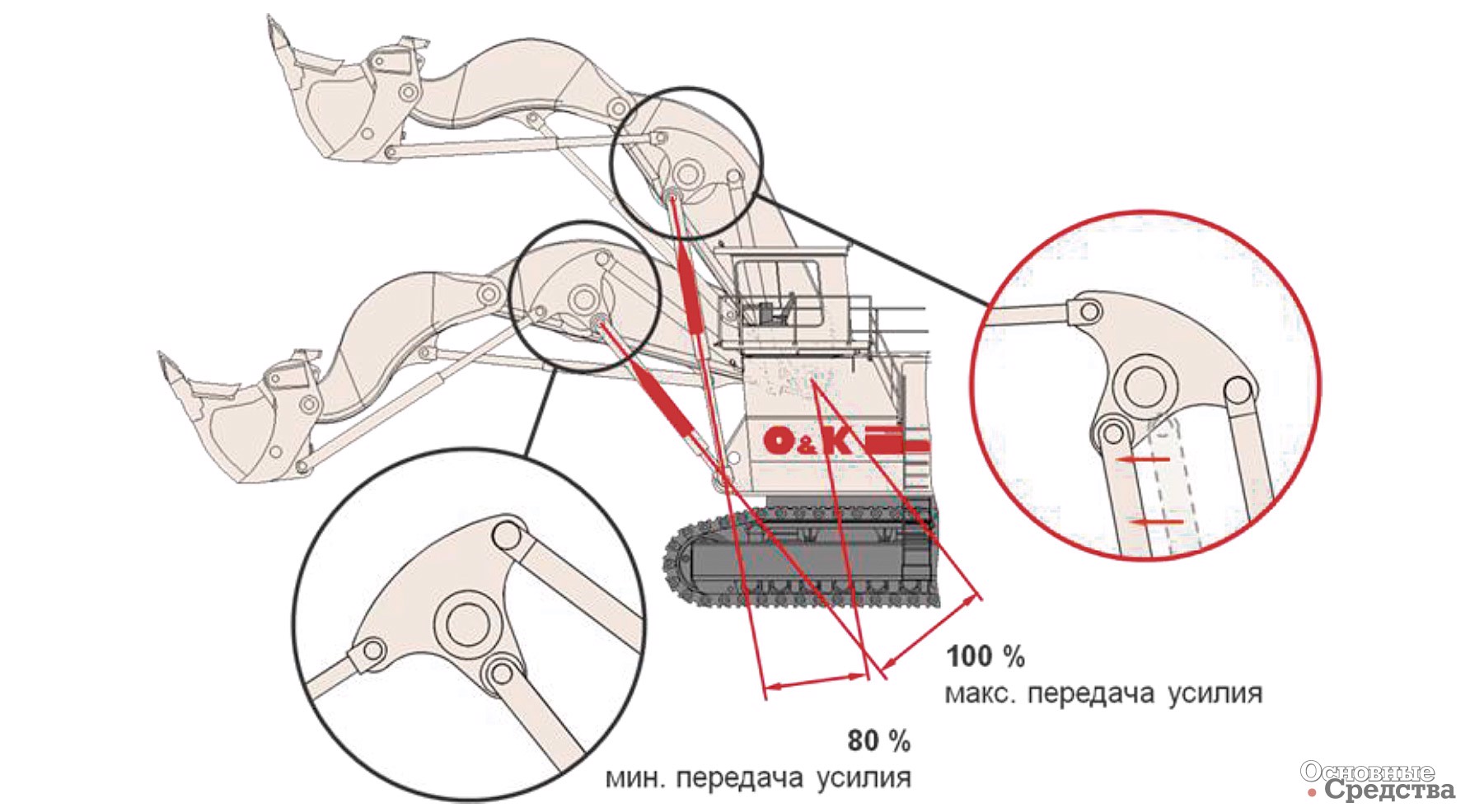
- Cоединение основного цилиндра (4) с трехопорным звеном (8) уменьшает сокращение плеча рычага настолько, что в конце концов даже в самом неблагоприятном положении цилиндра по отношению к стреле сохраняется 80% наибольшего плеча рычага, имеющегося в исходном положении (полностью втянутый цилиндр). Это существенное преимущество по отношению ко всем остальным схемам кинематики (см. рис. 1, 2). Усилие копания при кинематике TriPower по всей кривой копания уменьшается гораздо меньше.
- Однако одновременно такая кинематика влечет за собой и недостаток. Ковш (3) при этом поворачивается против часовой стрелки; это означает, что ковш вытягивается из копаемого грунта. Оператор постоянно должен регулировать цилиндр ковша, чтобы получить наполненный ковш.

На остальные функции обычной кинематики прямой лопаты кинематика TriPower влияния не оказывает. В итоге остается положительный эффект кинематики TriPower: благодаря использованию трехопорного звена (также его называют шатун) момент подъема основной стрелы уменьшается в гораздо меньшей степени, чем при использовании других типов кинематики. Оператору экскаватора с кинематикой TriPower, однако, требуется повышенный период тренировки, чтобы научиться компенсировать отрицательный эффект движения ковша против часовой стрелки (и тем самым против направления копания).
При осуществлении копания цилиндром рукояти и использовании цилиндра ковша в качестве тяги неизменной длины никакого отличия между «обычными» типами кинематики и TriPower нет, потому что эффект трехопорного звена в этом случае не проявляется.

Выводы
- При открытой разработке полезных ископаемых эксплуатируются экскаваторы как с обратной лопатой, так и с прямой лопатой. С помощью обоих видов рабочего оборудования достигаются высокие показатели производительности.
- С целью эффективной эксплуатации всех видов рабочего оборудования необходимо учитывать специфику их рабочих функций с самого начала проектирования и структурирования технологии разработки карьера или разреза.
- Кинематика TriPower имеет целью повышение потенциальной производительности экскаваторов с прямой лопатой.
- Положительный результат кинематики TriPower возникает от снижения степени уменьшения момента, который основной цилиндр создает на основной стреле.
- Воздействие кинематики TriPower на процесс копания ковша неоднозначное, и экскаваторщик должен тренироваться управлять этим ковшом дольше, чем длится обычное обучение оператора.
Литература
Tegtmeier D.: Das Patent «TriPower» und die Verbesserung von Ladeschaufelbaggern; Vortrag zum TEREX-Händlertag, Dortmund, 2002.
Mitriev R., Gruychev R., Pobegailo P.: CAD/CAE Ibvestigation of a large hydraulic excavator; Machine Design, Vol. 3 (2011) Nr. 1, Sofia.
Janssen B., Nievelstein M.: Multi-loop linkage dynamics via geometric methods – a case study on a RH200 hydraulic excavator; Internship report, Eindhoven University of Technology, Oct. 2003.
Dr.-Ing. Zinke H.-P.: Analysis and comparison of digging and breakout force on «TriPower» cinematics of face bshovels; China University of Mining and Technology, Beijing, 2009.


